🔹 미쓰비시 서보 드라이브 교체 방법 (MR-J 시리즈 기준)
미쓰비시 서보 드라이브(MR-J 시리즈) 교체는 기존 드라이브의 설정 백업, 하드웨어 교체, 설정 복구 및 테스트 단계로 진행됩니다.
📌 1. 교체 전 준비 사항
✅ PLC 및 시스템 전원 차단 (감전 및 장비 손상 방지)
✅ 기존 서보 드라이브의 파라미터 백업
✅ 서보 모터 및 케이블 상태 확인
✅ 교체할 새 서보 드라이브의 모델 확인
📌 2. 기존 서보 드라이브의 설정 백업
🔹 방법 1: FR Configurator2 소프트웨어 사용 (USB/RS-485 연결)
- PC에 FR Configurator2 프로그램 설치
- 서보 드라이브와 PC 연결 (USB 또는 RS-485 통신 포트 사용)
- 프로그램 실행 후 서보 드라이브 연결 및 파라미터 읽기
- 백업(파일 저장) 후 안전한 위치에 보관
🔹 방법 2: 서보 드라이브 내장 패널을 사용하여 직접 확인
- 서보 드라이브의 디지털 디스플레이를 사용하여 주요 설정값 확인
- P000, P001, P002 등의 주요 파라미터 기록
- 기존의 게인 설정값 및 위치 데이터 확인 후 기록
📌 3. 기존 서보 드라이브 제거
✅ 서보 드라이브 전원 차단 후 5~10분 대기 (잔류 전압 방전)
✅ 모든 케이블(전원, 엔코더, 모터, 통신) 연결 위치 메모 후 분리
✅ 고정 나사 및 브라켓 해체 후 서보 드라이브 제거
📌 4. 새 서보 드라이브 설치 및 연결
✅ 새 서보 드라이브가 기존 모델과 호환되는지 확인 (전압, 통신 방식 등)
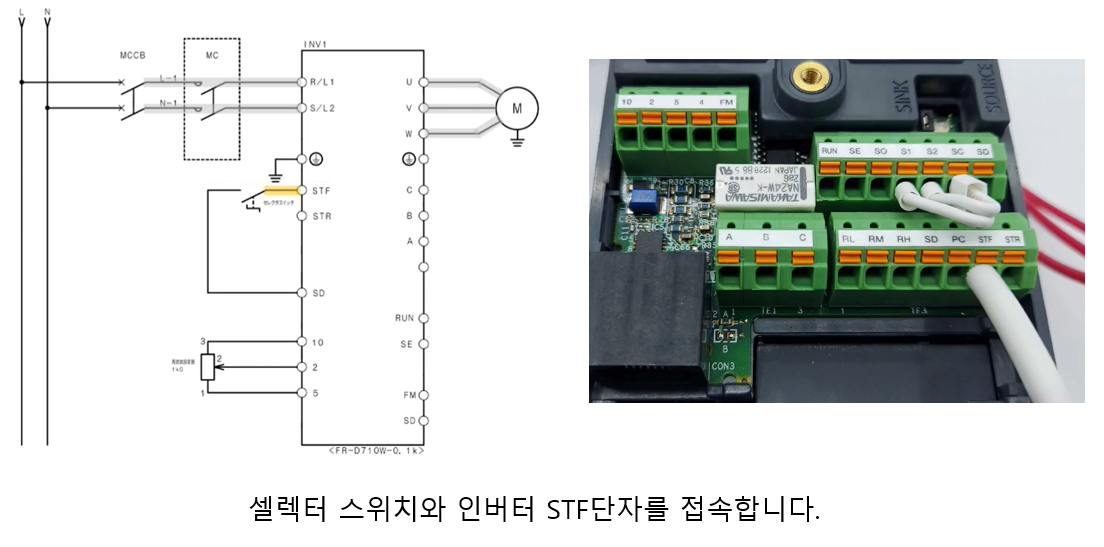
✅ 제어 케이블, 전원 케이블, 서보 모터 케이블을 기존과 동일하게 연결
✅ PLC와 통신하는 경우 RS-485, CC-Link, EtherCAT 등의 설정 확인
🔹 케이블 연결 참고
신호명 기존 드라이브 연결 위치 새 드라이브 연결 위치
| 전원 입력 (L, N, PE) |
기존 단자 확인 |
동일하게 연결 |
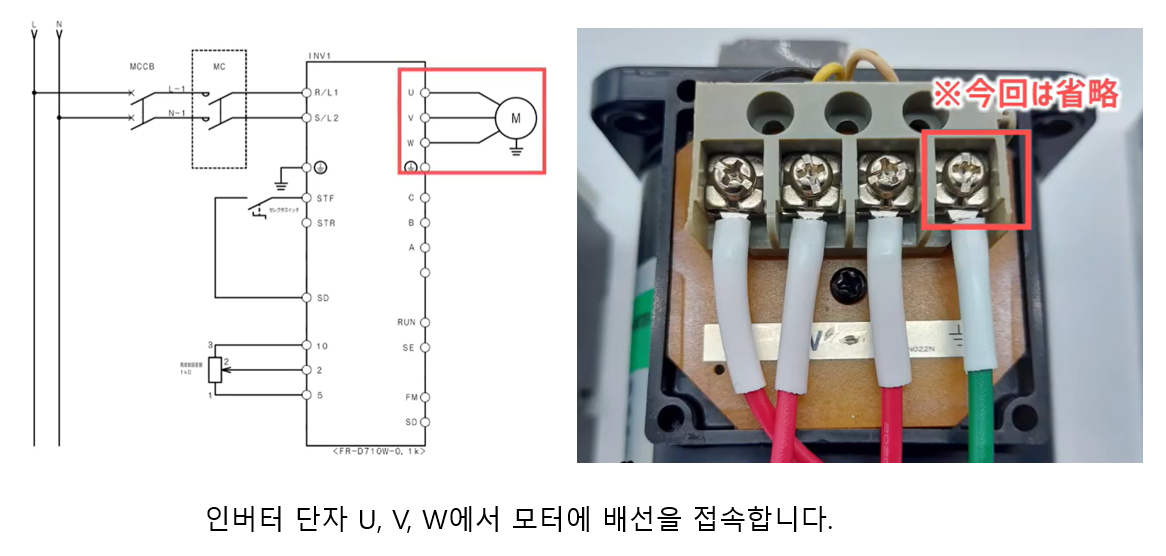
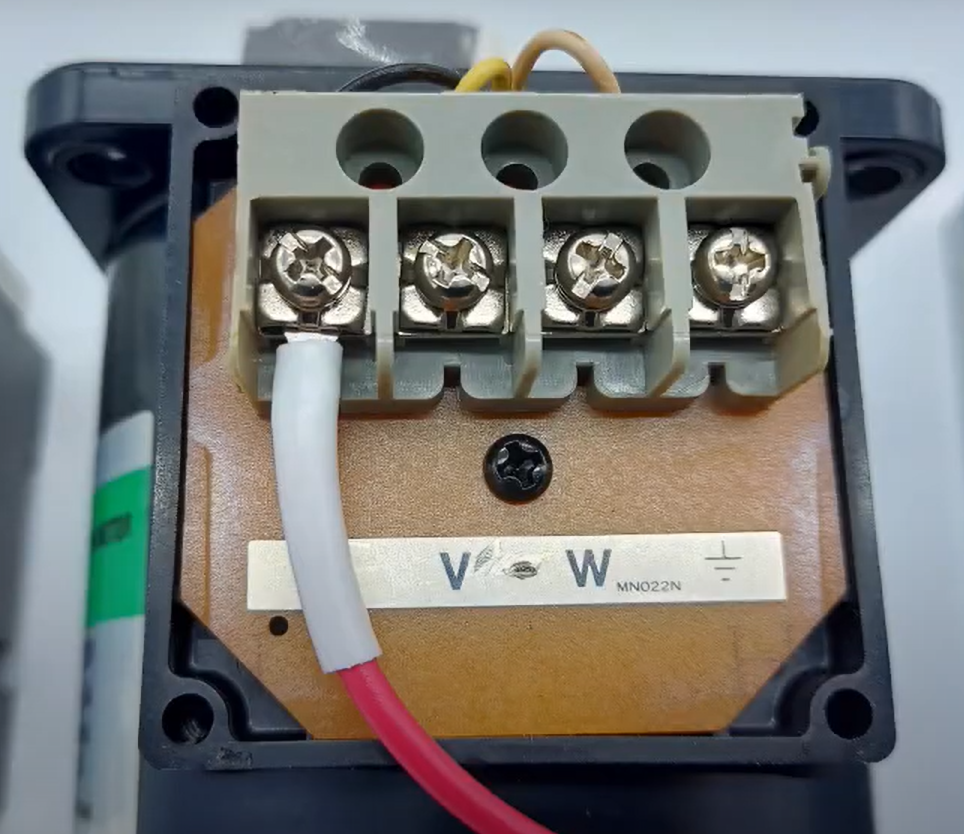
| 서보 모터 출력 (U, V, W) |
기존 단자 확인 |
동일하게 연결 |
| 엔코더 피드백 |
CN2 커넥터 |
동일한 위치에 연결 |
| 통신 (CC-Link, Modbus 등) |
RS-485, CN3 |
동일하게 연결 |
📌 5. 파라미터 복구 및 설정
✅ PC 소프트웨어(FR Configurator2)로 백업한 파라미터 복원
✅ 내장 패널에서 기존에 기록한 설정값 입력
✅ 새 서보 드라이브의 기본 파라미터 확인 및 조정
✅ PLC와 통신하는 경우 통신 설정 (전송 속도, 노드 번호 등) 확인
📌 6. 테스트 및 시운전 (Run Test)
✅ 수동 모드로 서보 모터 구동 테스트
✅ 위치 제어 및 속도 제어 정상 동작 확인
✅ 비상 정지(EMG) 및 알람 기능 점검
✅ 서보 드라이브 상태 표시(디지털 패널) 확인
📌 7. 최종 점검 및 완료
✅ PLC 및 전체 시스템과의 연동 확인
✅ 배선 정리 및 고정 나사 점검
✅ 이상 없을 시 정상 운영 시작
💡 ⚠ 교체 시 주의 사항
- ⚠ 전원 차단 후 최소 5~10분 대기 (잔류 전압 방전 주의)
- ⚠ 기존 서보 드라이브 모델과 새 모델이 호환되는지 확인 (전압, 제어 방식 등)
- ⚠ PLC와 연결된 경우 통신 설정 및 파라미터 동기화 필수
- ⚠ 최초 작동 시 저속으로 테스트 후 정상 여부 확인
✅ 결론
미쓰비시 서보 드라이브 교체는 백업 → 제거 → 설치 → 설정 복구 → 테스트 순서로 진행됩니다.
PLC와 연동된 경우, 파라미터 및 통신 설정을 주의 깊게 확인하는 것이 중요합니다. 😊